Robust Deformation Model Approximation for Robotic Cable Manipulation
Shiyu Jin*, Changhao Wang*, and Masayoshi Tomizuka
Welcome! This website supplements our IROS 2019 submission, in which we proposed a novel framework SPR-RWLS for robotic cable manipulation.
Cable manipulation is challenging work for robots. The major challenge is that soft objects have high degrees of freedom and are easy to deform during manipulation. In this paper, we propose a novel framework SPR-RWLS to manipulate cables, which includes real-time object tracking and robust local deformation model approximation. For object tracking, structure preserved registration (SPR) is utilized to robustly estimate the movement of selected points on the object even with outliers and under occlusion. Robust weighted least square(RWLS) is then applied to calculate the local deformation model of the object under uncertainty. We show that SPR-RWLS enabled the dual-arm robots to manipulate different cables to desired curvatures with sensor noise, outliers and under occlusions. We also show that real-time implementation of the proposed method can be simplified by parallel computation.
Robotic Cable Manipulation by SPR-RWLS
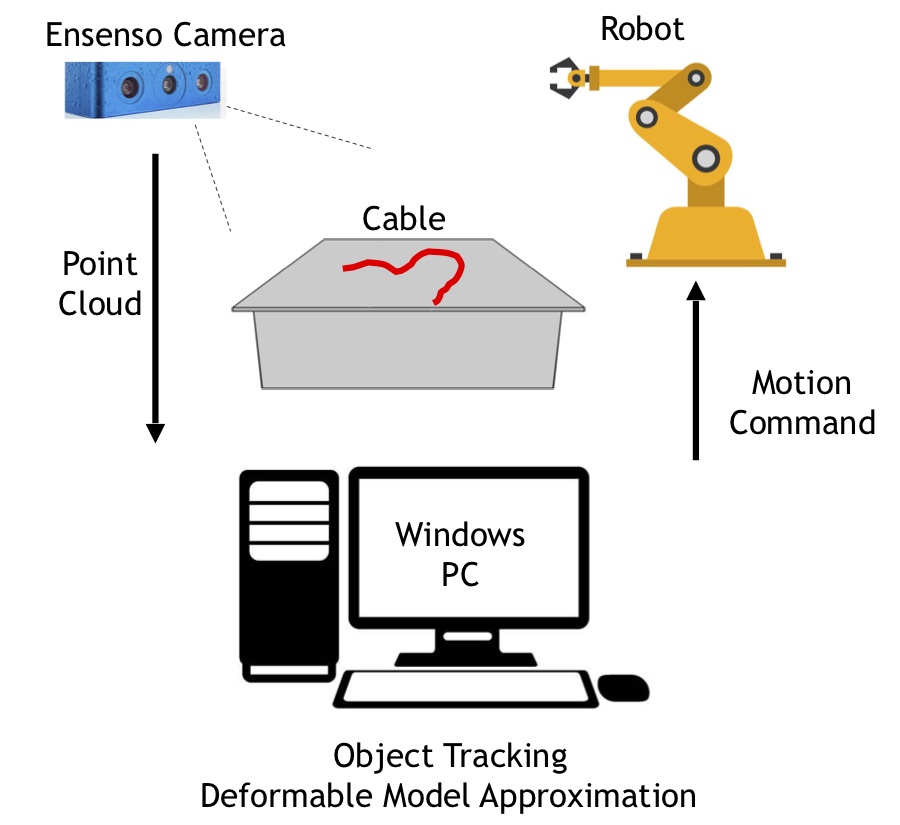
Experiment Setup:
We captured the point cloud and the experimental videos from different angles, so the shape of the cable may look a little bit different.
 |
Curvature 1:
Curvature 2:
Curvature 3:
Robotic Cable Manipulation by SPR-RWLS under Uncertainty
More Videos coming soon!!